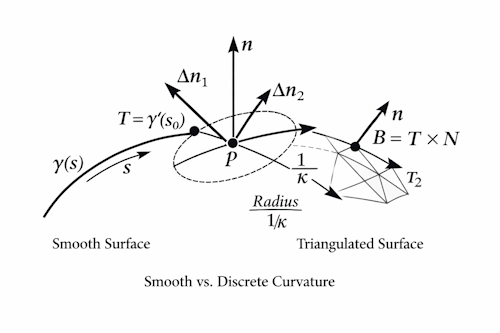
Curvature originates in the analysis of smooth curves.
\[ \gamma:I\subset\mathbb{R}\rightarrow\operatorname{R}^\mathbb{3} \]Consider a curve parameterized by arc length s.
The unit tangent vector is defined:
\[ T\left(s\right)=\gamma^\prime\left(s\right) \]and the curvature corresponds to the magnitude of the derivative of this tangent vector:
\[ \kappa\left(s\right)=\left\|T'\left(s\right)\right\| \]The principal normal is defined as:
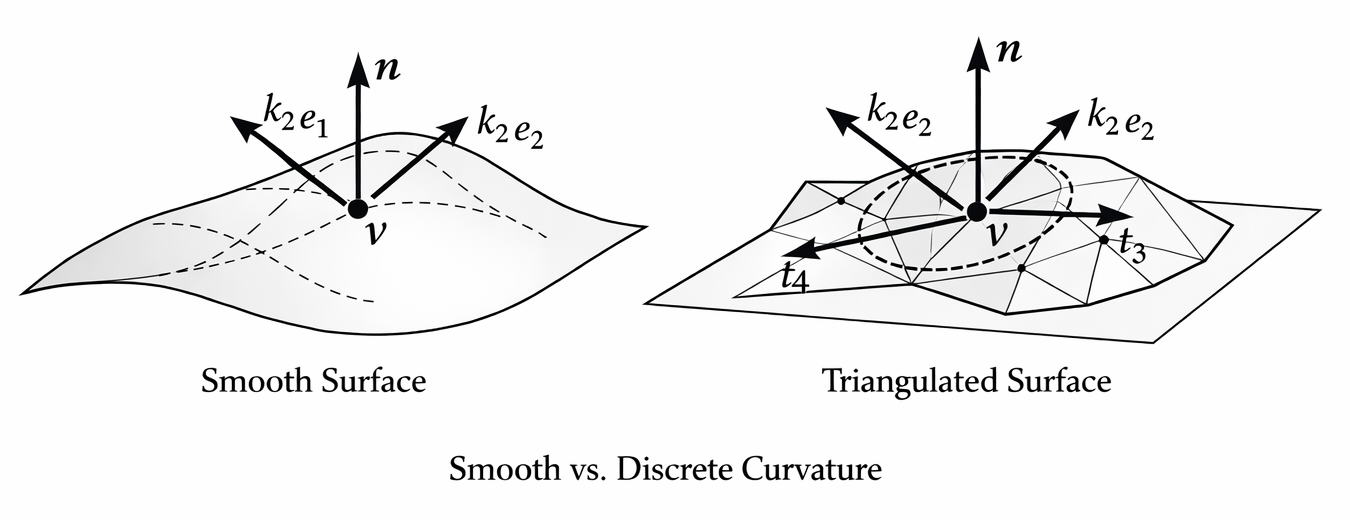
\[ N\left(s\right)=\frac{T'\left(s\right)}{\left\|T'\left(s\right)\right\|} \]Curvature quantifies the rate at which the tangent direction changes (see Figure 1). For example, straight lines have zero curvature \(\kappa=0\), while circles of radius r exhibit constant curvature \(\kappa=1/r\).